1
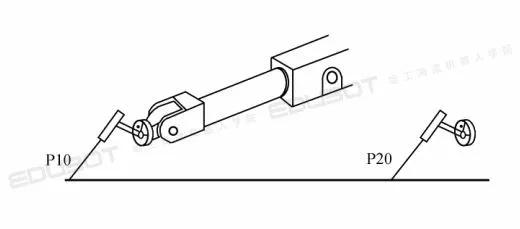
MoveL說明:機器人以線性移動方式運動至目標點,當前點與目標點兩點決定一條直線,機器人運動狀態可控制,運動路徑唯一,可能出現死點。MoveL 指令常用于機器人在工作狀態移動。
moveL p20,V1000,fine,tool0;
2
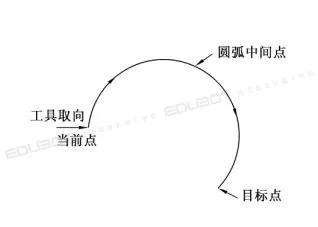
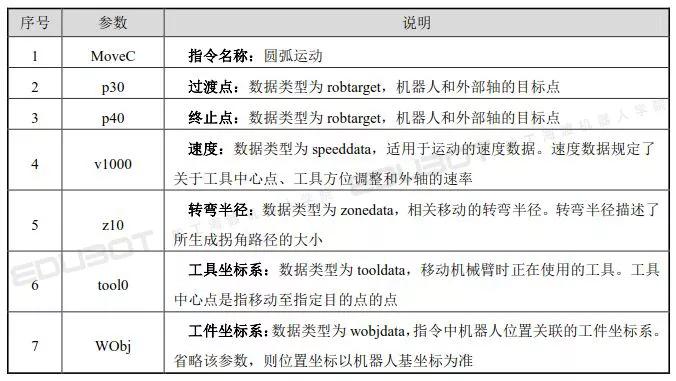
MoveC說明:機器人通過中間點以圓弧移動方式運動至目標點,當前點、中間點與目標點3點決定一段圓弧,機器人運動狀態可控制,運動路徑保持唯一。MoveC指令常用于機器人在工作狀態移動
moveL p10,V1000,fine,tool0;
moveC p20,p30,V1000,fine,tool0;
3
MoveJ說明:機器人以最快捷的方式運動至目標點,其運動狀態不完全可控,但運動路徑保持唯一。MoveJ 指令常用于機器人在空間大范圍移動
moveJ p20,V1000,fine,tool0;
 4
4
MoveJ、MoveL 和 MoveC 指令的綜合應用在進行一個畫圓動作時其路徑如下圖所示,其軌跡見下表。
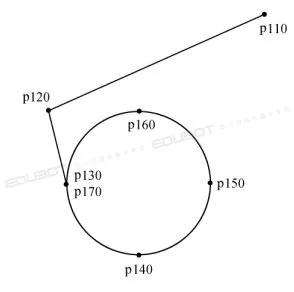
畫圓路徑示意圖
畫圓動作軌跡

[ 此帖被qq280853936在2020-12-15 16:52重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

